Search Results
Language-guided Semantic Mapping and Mobile Manipulation in Partially Observable Environments
Robot Language Understanding in Unknown Environments
NavigateSYS - Semantic Mapping & Mobile Inspection
Learning Navigation for Arbitrary Mobile Manipulation Motions in Unseen and Dynamic Environments
CoRL robot demonstrations
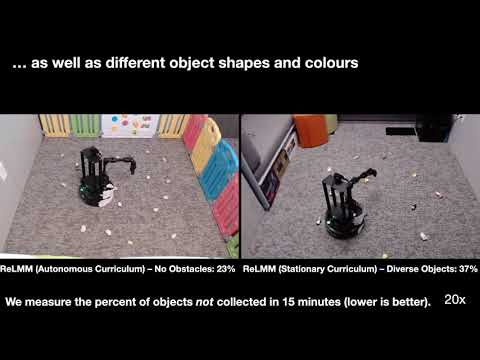
Fully Autonomous Real-World Reinforcement Learning with Applications to Mobile Manipulation
Efficient DL-Based Semantic Mapping Approach Using Monocular Vision for Resource-Limited Devices.
Adaptive Perception Demo
NBV-SC: Next Best View Planning based on Shape Completion for Fruit Mapping and Reconstruction
Online NBV Planner for 3D-Exploration and Inspection With a Mobile Manipulator Robot [Teaser]
"Active and Interactive Mapping with Dynamic GPIS for Mobile Manipulators", RA-L+ICRA 2021
RI Seminar: Thomas Howard : Enabling Grounded Language Communication for Human-Robot Teaming









![Online NBV Planner for 3D-Exploration and Inspection With a Mobile Manipulator Robot [Teaser]](https://img.youtube.com/vi/nsJ_LCio0h0/hqdefault.jpg)
